<th id="v03st"></th>
<strike id="v03st"></strike>
我们非常重视您的个人隐私,当您访问我们的网站时,请同意使用的所有cookie。有关个人数据处理的更多信息可访问《隐私政策》
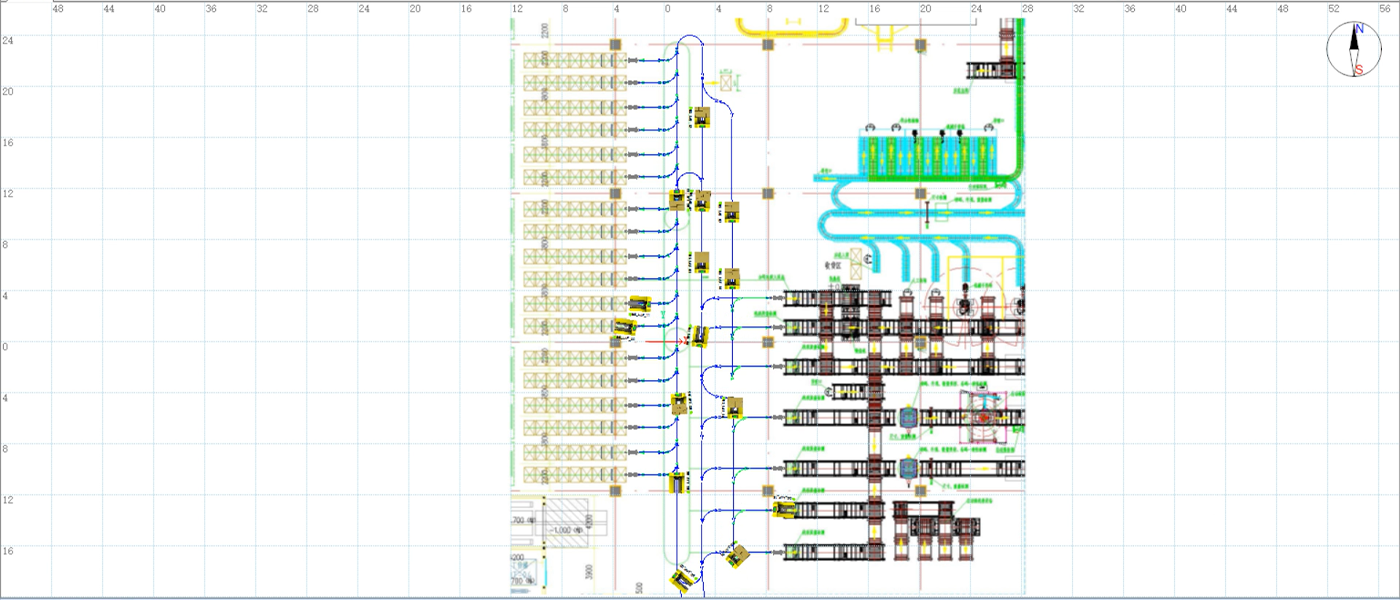
兰剑智能AGV调度软件主要包括仿真端模组、服务端模组、监控端模组、规划端模组。 基于自主开发监控与仿真一体化技术,可让仿真端模组与监控端模组共用一套核心算法与参数,相比独立的仿真软件,仿真结果更加准确;基于时间预测机制的AGV调度技术,在大规模AGV应用场景中,可有效提高AGV利用率,降低交通避障几率,实现整体系统效率的提升。

01
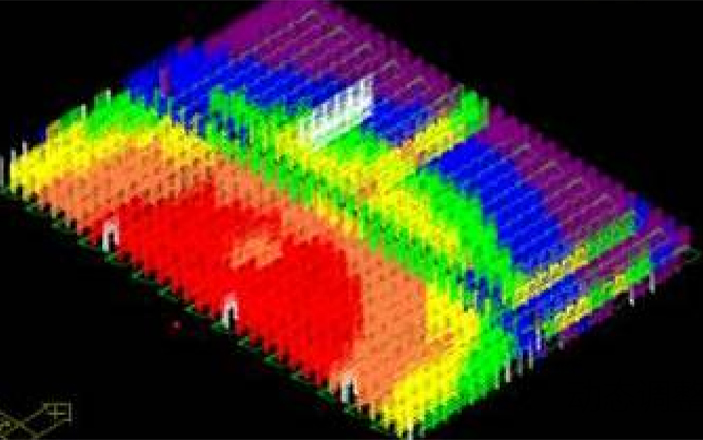
根据AGV任务信息,生成一系列连续时间窗模型,代表AGV的实时位置,实现了动态真实环境感知与表达,解决车辆之间时间和空间冲突。
02
额外考虑车辆外形尺寸,在时间窗维度上更能准确描述车辆运行环境,相比业内常用的基于管控规则的调度技术,可降低发生交通管制的概率,提高了大规模AGV并行工作效率。

03
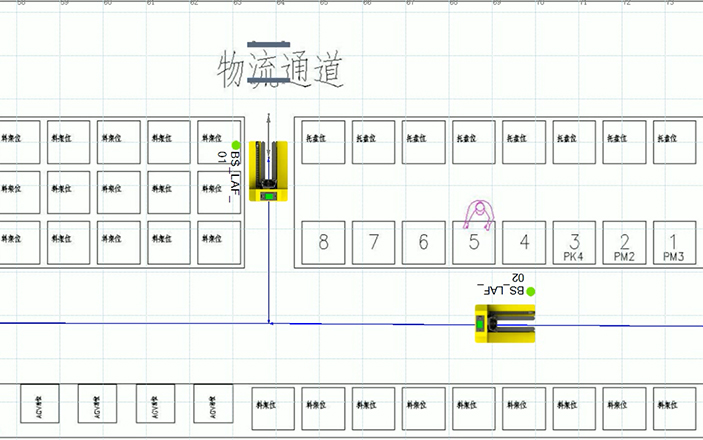
集合仿真与监控双重功能,让仿真功能可以全面引用监控功能中各种细节参数,相比单纯的仿真软件平台,仿真结果的准确性更高。监控功能引入了仿真功能中的虚拟车辆概念,可以在监控中分析增加车辆后的调度效果,功能更加丰富。
完善您的信息,兰剑智能专业团队为您提供服务!

<th id="v03st"></th>
<strike id="v03st"></strike>












-114.jpg)