<th id="v03st"></th>
<strike id="v03st"></strike>
我们非常重视您的个人隐私,当您访问我们的网站时,请同意使用的所有cookie。有关个人数据处理的更多信息可访问《隐私政策》
该技术将微型伺服电机、驱动器、减速机、位置传感器集合为一套整体的伺服模组,采用集成化方式控制拨爪机构执行翻转工作。
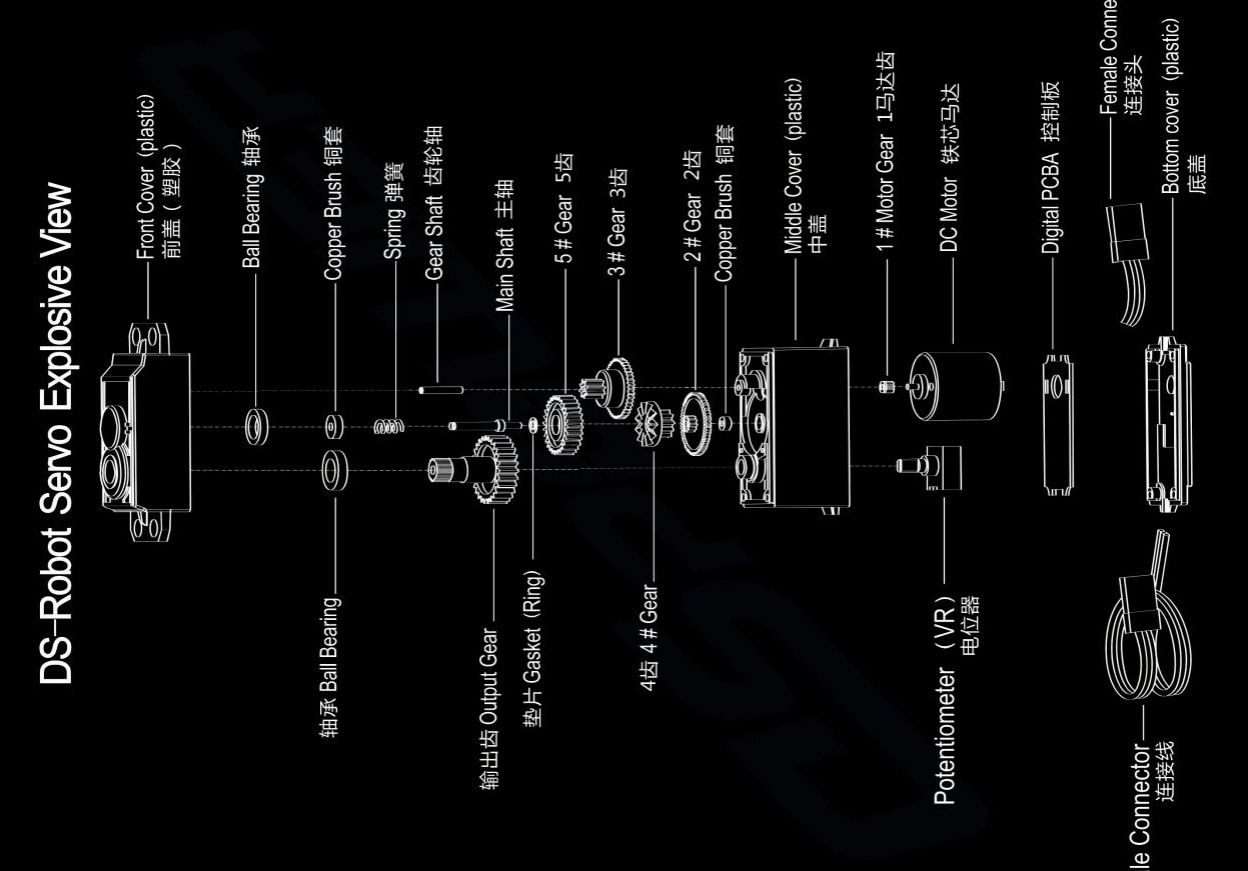


由于该技术采用专业的伺服电机,使用寿命相比有刷电机提高10倍以上,拨爪的定位精度提高1倍以上。
相比业内常用的直流有刷电机模组,装配更加方便快捷,性能更加稳定可靠。

该技术已经获得多项相关专利、软件著作权等自主知识产权证书
一种穿梭车货叉同步调整装置
货叉组件及穿梭车

穿梭车数字挛生仿真监控系统V1.0
新型货叉拨杆机构

完善您的信息,兰剑智能专业团队为您提供服务!

<th id="v03st"></th>
<strike id="v03st"></strike>