<th id="v03st"></th>
<strike id="v03st"></strike>
我们非常重视您的个人隐私,当您访问我们的网站时,请同意使用的所有cookie。有关个人数据处理的更多信息可访问《隐私政策》
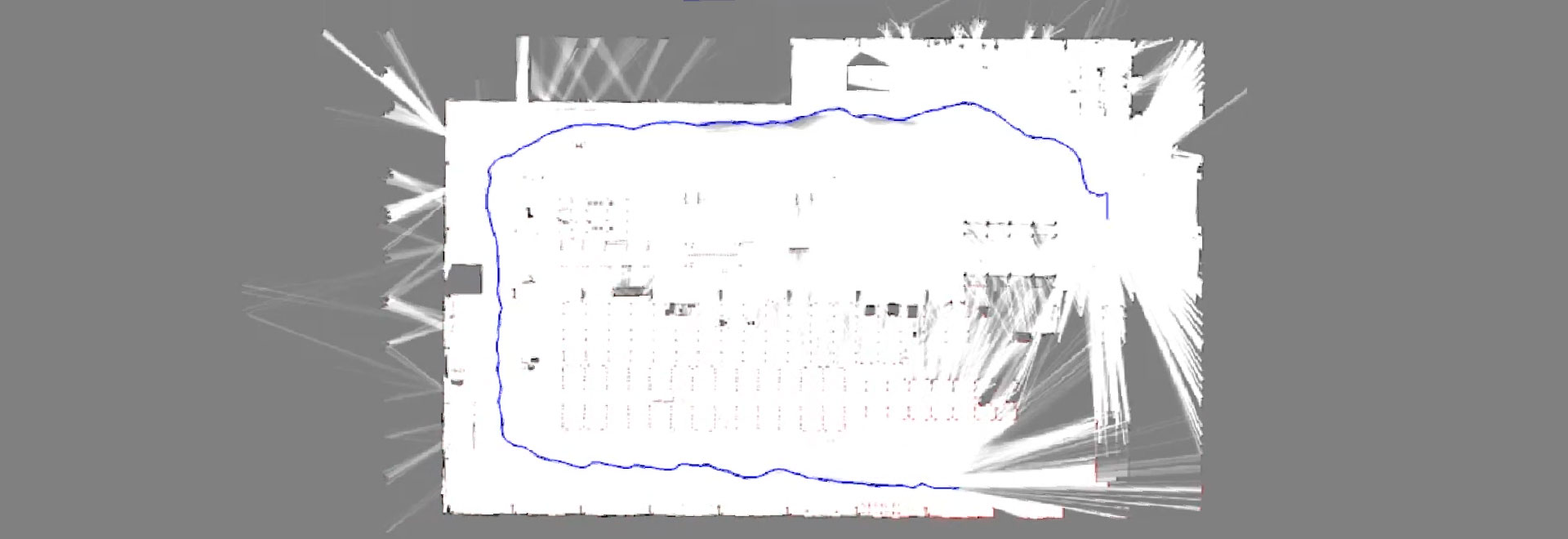
以激光SLAM导航为主的复合导航方式可实现托盘AGV复杂路径的运行,适用于工厂车间、普通平面仓库、货架仓库的工作环境,尤其适用在货架区域、出库缓存区域等环境变化较快的场景中。

准确高效,柔性灵活
基于3D视觉的空间避障技术,实现对更高高度障碍物的检测与躲避功能
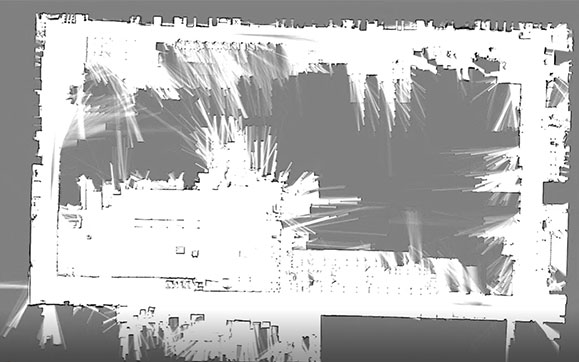
全自动检测周围环境,当周围环境变化率超过20%时,自动更新AGV导航地图
当激光雷达检测到周围环境变化,可动态更新AGV环境地图,显著降低周围环境变化对AGV定位精度的不良影响,大幅提高导航的稳定性。

该技术已经获得多项相关专利、软件著作权等自主知识产权证书

兰剑AGV地面控制系统
AGV和AGV系统

车架及叉车AGV

兰剑AGV调度系统 V1.0

完善您的信息,兰剑智能专业团队为您提供服务!

<th id="v03st"></th>
<strike id="v03st"></strike>












.jpg)